Chapter 7
Three Dimensional Modeling -The Spreadsheet
Documentation
This spreadsheet is, in the main, a large macro written in the Visual Basic language.
Rather than describe the spreadsheet in Visual Basic terms, the writers have chosen
to employ a largely mathematical description.
The applications of the worksheets are to determine trajectories in three dimensions for orbiting (and sub-orbiting) objects. Newton’s inverse square law of gravitational
attraction, buoyancy and atmospheric resistance are accounted for in the equations.
The coordinate system is xyz. The origin is such that the central body being orbited is assumed to be spherical with its centre fixed at the origin of the xyz system
with the z-axis emerging from the north pole of the sphere. The xyz coordinates are absolutely fixed with respect to the universe.
In the case of the Earth, the central body rotates on its axis once per sidereal day. A point located on or near Earth is specified by fixed Latitude, Longitude, and Altitude coordinates. In terms of the xyz coordinate system, points attached
to Earth have their xy coordinates constantly changing due to rotation about the z-axis.
The atmosphere is assumed to rotate with the Earth.
The model is set up such that the launch point is in the xz plane at t = 0 (the time of launch), irrespective of where the point is located on Earth.
Worksheets
There are four worksheets, Paris, Geo, Elliptic, and Planet,
each intended for
different modeling situations.
Paris
This sheet is intended for sub-orbits near Earth where atmosphere resistance is
at play. Inputs include the location of the launch point. Outputs include the impact
point and its range and bearing from the launch point. It is assumed that the launcher
is fixed to the earth.
Geo
Used to study geosynchronous orbits that are strictly along the equator
of the body being orbited.
Elliptic
Used to study arbitrary orbits.
Planet
Intended for use in determining the trajectory for any planet. A site that provides
data for planet orbits can be seen here.
Charts of orbits are the orbits projected on the xy plane. Highly inclined
orbits will usually look artificially elliptical.
Input Parameters
The same set of parameters, more or less, is provided for all the sheets. The exact
set of parameters, their interpretation and wording, changes from sheet to sheet.
Latitude, Longitude, and Altitude are Earth based coordinates of a launch point.
For a satellite launch, Latitude and Longitude are values projected down to earth's
sea level.
See the following parameters for the Elliptic sheet as an example.
Latitude
This is the latitude, in degrees, of the launch point as measured on the earth.
On the planet sheet this parameter is used to specify the initial location above/below
the orbit plane that the planet has at t = 0. For satellites on the Geo sheet, Latitude
is forced to 0.
Longitude
This is the longitude, in degrees, of the launch point as measured on the earth.
East is positive and West is negative. The launch point is always aligned
with the xz plane at t = 0.
Altitude
On the Planet sheet, this parameter is Distance and represents the centre-to-centre
distance between the sun and the planet. For the other sheets, this is the altitude
of the launch point. Altitude is zero at sea level on earth.
At time t = 0 a launch point is in the xz plane so the initial x, y, z, r, θ, φ
of the object are:
r = earthRadius + Altitude
θ = 90 - Latitude (degrees)
φ = 0
x = (earthRadius + Altitude) * cos(Latitude)
y = 0
z = (earthRadius + Altitude) * sin(Latitude)
Elevation
This is the launch point elevation in degrees, the angle above the local
horizontal or tangent plane that the launch barrel is pointing. The meaning
is similar for satellite launches; elevation is zero if the object is launched in
the tangent plane. For satellites on the Geo sheet elevation is forced to
zero.
Azimuth
This is the number of degrees from north the launch barrel is pointed, as measured in the
tangent plane. On Earth this would be called the compass bearing. East
is 90 degrees and so on.
Launch Velocity
This is the initial velocity of the object in meters per second. For a cannon or other
launch device attached
to the Earth, the Earth's spin on the z-axis imparts an easterly velocity to any launched
object. The appropriate velocity is provided by the software as determined from
the latitude of the launch site.
After launch, the object is subjected to the same orbital
physics as are satellites and planets. The velocity of an orbiting object is measured
with respect to the xyz coordinate system. Except for the Paris sheet, the launch is assumed to occur from a platform that is stationary with respect to the
xyz coordinates.
G*M
The Standard Gravitational Parameter.
For Earth G*M ~= 398,600,441,800,000 metres^3/second^2.
For our Sun G*M ~= 132,712,440,018,000,000,000 metres^3/second^2.
Sidereal Day
This is the rotation period of the Earth in seconds, not used on the Planet sheet. It is
used to calculate the longitude of an object at a given time. The longitude is needed
to calculate the arc distance and bearing from launch point to object. If
the objects coordinates are x, y, z then:
Object_r = sqrt(x^2 + y^2 +z^2)
Object_θ =atan(z / r)
Object_φ =atan(y / x)
Since φ corresponds to Longitude and φ = 0 for the launch point at t = 0, then
at time t
Launch_φ = (2 * π * t) / SiderialDay
The Longitude of the object at any t, x, y, z, is:
Object_Longitude = atan(y / x) - (2 * π * t ) / SiderialDay + Longitude
Also, Object_Latitude = π / 2 - Object_θ
= π / 2 - atan(z / r)
Rotation Factor
The value zero turns off earth's rotation, the value one turns it on. This could
be used to demonstrate the effect of Coriolis.
Earth Radius
We usually employ a radius of 6,371,010.00 metres.
Object Density, Object Radius, Cd
These parameters are the same as described in Chapter 3 and Chapter 6. For a discussion
of Cd, see Chapter 6 "The Drag Coefficient".
In Chapter 3 we took buoyancy into account as a modification to g in the differential
equation. That was because buoyancy creates a force that is opposite to gravity:
One may think of an effective or buoyant mass mb for an object with mass m where:
mb = m * (1 - pfluid / pobject). Under gravity the object will fall if its density
is greater than that of the fluid and rise if less.
Step Size
This is the integration interval in seconds.
Steps Per Output
This is the number of integration steps from one output row to the next. Use 1 to
get one output for each integration step.
Number of Outputs
This is the total number of rows of output. If Outputs were 1,000 and Steps were 1,000 then
there would be 1,000,000 integration steps.
Last Output Time
The value in this cell is Step size * Steps Per Output * Number of Outputs.
Area, Volume, Mass, k Sea Level
These are the same as in previous topics.
Obs Latitude
On the Elliptic sheet. This is the latitude of an observer on earth, in degrees.
North is positive.
Obs Longitude
On the Elliptic sheet. This is the longitude of an observer on earth, in degrees.
East is positive.
Analytic Outputs
These are seen in column D and were described in the preceding topic.
The Output Table
Some rows from the output table for the Elliptic sheet are shown next, in two sections.
The output needs of the four sheets differ, just as their input needs differ. Some
columns are required on one sheet and not on another.
All sheets show the object coordinates with time: t, x, y, z as well as r, θ, φ. Distances are in metres for the Paris sheet, megametres for Satellites, and gigametres
for planets.
On the Paris, Geo, and Elliptic sheets there are also columns for:
Alt = r - earthRadius
ObjectLat = sub-point on Earth latitude of object
ObjectLon = sub-point on Earth longitude of object
Range = distance from launch sub-point and to object sub-point
as an arc distance
Bearing = azimuth angle from launch sub-point to object sub-point
measured clockwise from North.
KE-PE is kinetic energy less gravitational potential energy:
= mass * (Vx^2 + Vy^2 + Vz^2) / 2 - GM * mass / r
At escape velocity KE-PE is zero.
The Elliptic sheet has two additional output columns:
Obs Elevation is the elevation the observer sees between his horizon
and the object in orbit, in degrees.
Obs Az is the azimuth the observer sees between his north compass
point and the object in orbit, in degrees, measured in his tangent plane
Integration Routine for Macro
Overall, the macro that processes the spreadsheets is organized as follows:
Calculation()
Initialize (determine all required globals, including standard atmosphere
model)
GetInputs()
(get the configured parameters for the simulation)
OutputAnalytics()
(analytic calculation)
Integrate()
(There is a choice of employing a first or a second order integration
process. The second order process is further discussed subsequently. Both processes
include
writing individual
rows of output at prescribed intervals of the integration process)
OutputResults()
(this includes drawing charts according to output rows
derived by Integrate())
End
Apart from second order integration, the routines in the macro use straightforward spreadsheet
processes to obtain and present data. Formulas used for analytic calculations are
covered elsewhere.
The integrate subroutine is best described with psuedo-code. The syntax used corresponds
to Excel Basic:
Integrate()
' set up the initial values for variables according to configured inputs
If (ActiveSheet.Name = "Planet") Then
r = launchAlt ' the entered value is center-center
distance
Else
r = earthRadius + launchAlt
End If
Theta = Pi / 2# - launchLat
phi = 0
x = r * Sin(Theta) * Cos(phi)
y = r * Sin(Theta) * Sin(phi)
z = r * Cos(Theta)
Vr = launchVelocity * Sin(launchElev)
Vtheta = -launchVelocity * Cos(launchElev) * Cos(launchAz)
' for the Paris worksheet, the object is launched from a cannon that
is rotating
' with the earth, so imparts an additional phi velocity to the object
If (ActiveSheet.Name = "Paris") Then
Vphi = launchVelocity * Cos(launchElev) * Sin(launchAz)
+ factor * 2 * Pi * r * Cos(launchLat) / siderealDay
Else
Vphi = launchVelocity * Cos(launchElev) * Sin(launchAz)
End If
' Resolve the spherical V into Cartesian V
Vx = Vr * Sin(Theta) * Cos(phi) + Vtheta * Cos(Theta) * Cos(phi) -
Vphi * Sin(phi)
Vy = Vr * Sin(Theta) * Sin(phi) + Vtheta * Cos(Theta) * Sin(phi) +
Vphi * Cos(phi)
Vz = Vr * Cos(Theta) - Vtheta * Sin(Theta)
While (i <= lastStep)
r = Sqr(x ^ 2 + y ^ 2 + z ^ 2)
r3 = r ^ 3
Theta = thetaFromXYZ(x, y, z)
phi = phiFromXYZ(x, y, z)
If (stepsSinceLastOutput >= stepsPerOutput) Then
' each sheet has its own layout for output,
call respective subroutine
If (ActiveSheet.Name = "Paris") Then
OutputRowParis
ElseIf (ActiveSheet.Name = "Geo") Then
OutputRowGeo
ElseIf (ActiveSheet.Name = "Elliptic") Then
OutputRowElliptic
ElseIf (ActiveSheet.Name = "Planet") Then
OutputRowPlanet
End If
stepsSinceLastOutput = 0
End If
' Calculate the forces acting on the object at this time
' For the Paris sheet, the following set of equations assume the Earth
drags
' the atmosphere along totally. At earth's surface
' the atmosphere moves at the same speed as the ground, etc.
If (ActiveSheet.Name = "Paris") Then
Wr = 0
Wtheta = 0
Wphi = factor * 2# * Pi * r * Cos(launchLat) / siderealDay
Wx = Wr * Sin(Theta) * Cos(phi) + Wtheta * Cos(Theta)
* Cos(phi) - Wphi * Sin(phi)
Wy = Wr * Sin(Theta) * Sin(phi) + Wtheta * Cos(Theta)
* Sin(phi) + Wphi * Cos(phi)
Wz = Wr * Cos(Theta) - Wtheta * Sin(Theta)
Else
Wx = 0
Wy = 0
Wz = 0
End If
' total force on the projectile is sum of buoyancy, air friction,
gravity.
' buoyancy factor (BF) is radial, friction factor (F) is in opposite
' direction of velocity.
' BFr, FFv group common factors to avoid duplicate multiplications
Sy(row) = r - earthRadius
Atmosdensity ' update ph(row) for this value of Sy(row)
BFr = GM * (1 - ph(row) / Density) / r3
' radial bouyance and gravity factor
FFv = Kay / 1.225 * ph(row)
FFx = FFv * (Vx - Wx) ^ 2 * Sgn(Vx - Wx)
FFy = FFv * (Vy - Wy) ^ 2 * Sgn(Vy - Wy)
FFz = FFv * (Vz - Wz) ^ 2 * Sgn(Vz - Wz)
' get the current acceleration due to these forces
' use second order update process ie 3*Fcurrent/2 - Aprevious/2
Ax = -(BFr * x + FFx)
Ay = -(BFr * y + FFy)
Az = -(BFr * z + FFz)
x = x + 0.5 * (3 * Vx - prevVx) * delta_t
y = y + 0.5 * (3 * Vy - prevVy) * delta_t
z = z + 0.5 * (3 * Vz - prevVz) * delta_t
' done with using prevVi, so update them for next time through loop
prevVx = Vx
prevVy = Vy
prevVz = Vz
Vx = Vx + 0.5 * (3 * Ax - prevAx) * delta_t
Vy = Vy + 0.5 * (3 * Ay - prevAy) * delta_t
Vz = Vz + 0.5 * (3 * Az - prevAz) * delta_t
' done with using prevAi, so update them for next time through loop
prevAx = Ax
prevAy = Ay
prevAz = Az
' move to the next step and increment quantities accordingly
i = i + 1
' for the first set of steps, time, t = t + smaller, dynamic time
increments.
' after that, time is determined by stepSize and i (= step number)
If (i > 10) Then
t = (i - 10) * stepSize
stepsSinceLastOutput = stepsSinceLastOutput + 1
ElseIf (i > 2) Then
smallStepSize = smallStepSize * 2
t = tPrev + smallStepSize
Else
t = tPrev + smallStepSize
End If
delta_t = t - tPrev
tPrev = t
Wend
End Sub ' Integrate
Second Order Integration
Many methods have been developed for numerical integration.
Their many descriptions and applications are beyond the scope of this topic. The
reader will find many sources
of information on methods of numerical integration
in mathematical texts and on
the Internet.
How do you measure the worth of
an integration method?
When computation time is considered as important, a user would like to achieve a
desired precision while
using the least calculation time. For a given problem class some methods
will be better in this sense than others. Our 3D spreadsheet macro provides the user with
two choices, a first order process and a second order process.
The fundamental step in first order integration involves deriving a new quantity, such as
velocity, by adding to the current velocity the product of acceleration and the time interval of the step. This first order process produces better results the more slowly the involved quantities change over time and the smaller the time
interval of the step.
Second order modeling may improve the
process, especially where the quantities change with time but are well behaved, as in the motion of satellites
around the earth.
To describe second order integration more precisely, let the time varying
acceleration, velocity and position be represented by the symbols A(t), V(t), and R(t), respectively.
At any particular step in the integration, the time t = t0, V(t0) and R(t0)
are known because they are derived from the integration loop. The acceleration A(t0) is calculated from the velocity V(t0)
which in turn has been calculated from the influences of gravity, buoyancy and atmospheric
resistance on the object at position R(t0).
To obtain a second order estimate of the next value of velocity V (at time t1
= t0 + Dt where step size Dt = t1 - t0
= t0
– t-1), we approximate V(t) with the first
three terms of a power series
, around the current time, t0. This series is:
V(t) = V(t0) + C1 * (t – t0)
+ C2 * (t – t0)^2
, where C1 and C2 are constants that can to be found in the manner that follows.
Rearranging
the foregoing expression and presuming that time dt is extremely small
gives:
dV = V(t + dt ) - V(t)
= V(t0) + C1 * (t
+ dt – t0) + C2 * (t + dt – t0)^2
- V(t0) - C1 * (t – t0)
- C2 * (t – t0)^2
Then expand the squared terms to provide:
dV = V(t0) + C1 * (t + dt – t0)
+ C2 * (t^2 + dt^2+ t0^2
+2t*dt -2*t*t0 -2*dt*t0)
- V(t0) - C1 * (t – t0)
- C2 * (t^2 - 2 * t * t0
+ t0^2) then,
presuming that C2*dt^2 is so small that it can be neglected and collecting terms
obtain:
dV = C1 * dt + 2 * C2 * (t -t0)
* dt or:
A(t) = dV/dt = C1 +2 * C2 * (t – t0)
Then at t = t0:
A(t0) = C1 + 2*C2 * (t0–
t0)
That is: C1 = A(t0)
At t = t-1
A( t-1) = C1 + 2 * C2 *
( t-1– t0)
and since ( t-1– t0)
= -Dt
A( t-1) = A(t0)
- 2 * C2 * Dt = Thus:
C2 = (A(t0) - A( t-1))
/ (2*Dt
)
The velocity model is:
V(t) = V(t0) + C1 * (t – t0)
+ C2 * (t – t0)^2 that,
using the values for C1 and C2, becomes:
V(t) = V(t0) + A(t0)
* (t – t0) + (A(t0)
– A(t-1) / (2 * Dt) * (t – t0)^2
Setting t = t1 gives a second order estimate
of velocity V(t1) as:
V(t1) = V(t0)
+ A(t0) * (t1
– t0) + (A(t0)
– A(t-1)) / (2* Dt) * (t1
– t0)^2
and setting (t1
– t0) = Dt we obtain:
V(t1) = V(t0)
+ A(t0) * Dt +
(A(t0)
– A(t-1)) / 2 * Dt or:
V(t1) = V(t0)
+ ( 3 *A(t0)
– A(t-1)) * Dt /2
Which is the sought second order estimate for V(t),
Note that A(t0) must be
retained in memory
to serve as A(t-1) in
the next iteration.
We sometimes describe the process of estimating the next value as a prediction method.
Comparative Performances of First and Second Order Integration in Vacuum
In the absence of an atmosphere the period of an orbit can be determined analytically with
great accuracy. In exactly one period the xyz parameters should be identical to
those at the beginning of the period. This fact is used to compare the performance
of integration methods and step sizes.
For the comparison we chose a body in an eccentric equatorial orbit with a minimum altitude of 100,000 m and maximum altitude
of about 626,849 m. The chosen period was 5500 s.
A chart showing the xyz parameters for this orbit at t = 0, and again at t = 5500
employing 1st order integration, red, and 2nd order integration, blue, each with
three step sizes is shown next:
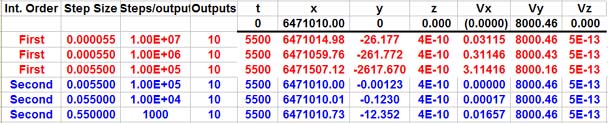
It can be observed that 2nd order integration with step size 0.55 s provides a more
accurate result than does a step size of 0.000055 s when 1st order integration is
employed.
Note that the derivation of a second order integration process for use when step
size is not uniform is available from the Download tab on the upper row of tabs.
As it provides a somewhat broader and more detailed view of numerical integration,
the interested viewer may wish to consult it.
Second Order Integration in Atmosphere
There are no analytic benchmarks for trajectories in atmosphere.
One method of determining a useful step size for a class of problem is
to observe the convergence of trajectory characterization values, as step size is made
smaller. This is the procedure now illustrated.
For illustration we chose a body with a velocity that in vacuum would result in a circular equatorial Earth orbit
at an altitude of 1,000 m with period of just over 5062 seconds. In atmosphere it will be in a sub orbit and fall to the
Earth The
body was assigned a Cd of 2.0. Its xyz parameters and altitude at t = 40.49632755.... s were observed for a range of step sizes. See the results next:

The accuracy required by the user might be to about the
nearest metre in altitude. Noting that there is little and diminishing change in
reported altitude taking place when step size is below ~0.005, then that or a slightly smaller step size could be chosen.
Next
The use of a spreadsheet to find a complete orbit
from a few observations.